揝摴柾宆俴俙俶惂屼
嶌傝曽忣曬丂仺丂
帒椏
T-SH7706LSR 儅僀僐儞儃乕僪,RaspberryPi娐嫬愝掕丄偦偺懠偺旛朰榐丂丂丂2023.7.--
彅帠忣偵傛傝僙儈僫乕傪幚巤偟側偔側偭偰媣偟偄丅
僙儈僫乕偵娭學側偔惂嶌婰帠側偳嵹偣偰偄偙偆偲巚偆丅
忋晹偵怴偟偄忣曬丄壓晹偵屆偄忣曬偺弴偲偡傞丅乮壓晹偼旛朰榐揑乯
侾丏儘儞僌僪儔僀僽偺戅孅側帪娫傪妝偟傓偨傔偵
RaspberryPi4傪巊偭偰摦夋僒乕僶乕傪嶌偭偰傒傞丅

乮奣梫乯
婰帠峏怴丗2023.7
RaspberryPi傪WiFi儖乕僞偵偡傞偲偄偭偨婰帠偑僀儞僞乕僱僢僩偱徯夘偝傟偰偄傞丅
偙傟傪墳梡偟偰RaspberryPi4傪巊偭偰摦夋僒乕僶乕傪嶌偭偰傒傞丅
RaspberryPi4偑WiFi傾僋僙僗億僀儞僩偵側偭偰偄傞偺偱丄庤帩偪偺僗儅儂丄僞僽儗僢僩偱愙懕偟丄
RaspberryPi4偵庢晅偗偨USB儊儌儕偺摦夋傪尒傞偙偲偑偱偒傞丅
USB儊儌儕偵偼偁傜偐偠傔嵞惗偟偨偄摦夋僨乕僞傪曐懚偟偰偍偔丅
儘儞僌僪儔僀僽偺戅孅側帪娫傪妝偟傓偨傔偵丄巊偭偰傒傞偺傕偄偄偐傕偟傟側偄丅
傕偭偲傕僞僽儗僢僩抂枛偵SD儊儌儕抂巕偑偁傟偽偙傫側偙偲偟側偔偰傕丅丅丅丅偲偄偆榖傕偁傠偆偐偲巚偆偑丄
愄偺僞僽儗僢僩偵偼SD儊儌儕抂巕偑側偐偭偨傝偡傞偺偱僞僽儗僢僩偺嵞妶梡偱偁傞丅
偝傜偵丄傾儗儞僕偲偟偰USB儊儌儕偺戙傢傝偵HDD偵偡傟偽曐懚摦夋偼梋傝偁傞悢偲側傞偩傠偆丅
摦夋偵偼挊嶌尃偑偁偭偨傝偡傞偺偱屄恖偱妝偟傓偩偗偵偡傞丅
嵞惗傾僾儕偵偼僼儕乕偺VLC偑偍姪傔偱偁傞丅乮懠傪帋偟偰偄側偄偩偗乯
傑偨丄暿搑RaspberryPi0傪愙懕偟偰RaspberryPi0偵僇儊儔傪庢傝晅偗僪儔僀僽儗僐乕僟
偁傞偄偼娔帇僇儊儔偲偄偭偨巊偄曽傕偱偒傞傛偆偵側偭偰偄傞丅
乮捛婰丗偦偺屻RaspberryPi0_2偱偺巊梡専徹偟偨偲偙傠丄OS偺bullseyes偺昗弨ffmpeg摦嶌偑晄埨掕偱偁傝丄
寢嬊buster亄ffmpeg偲偟側偄偲摦嶌埨掕偟側偄丅
儊儕僢僩偲偟偰RaspberryPi0_2偼4僐傾側偺偱僐儞僷僀儖帪娫偼Pi3摨摍丅乯
婰帠偵偁傞傛偆側桳慄LAN傪愙懕偟偨傑傑偱偼儘儞僌僪儔僀僽偳偙傠偐幵偵帩偪崬傔側偄偺偱丄桳慄LAN傪偼偢偡偙偲偵側傞丅
偟偐偟丄僀儞僞乕僱僢僩愙懕側偟偱偺RaspberyPi4偵偼崲偭偨偙偲偑惗偠傞丅
傕偲傕偲RaspberryPi偺帪崗僨乕僞偼僀儞僞乕僱僢僩宱桼偱摼傞偨傔揹尮傪愗傟偽帪崗僨乕僞偼徚偊偰偟傑偆丅
偦偺偨傔忢帪僀儞僞乕僱僢僩偲偺愙懕傪妋曐偟偰偍偔昁梫偑惗偠傞丅
傕偟偔偼壗傜偐偺曽朄偱丄偨偲偊偽USB宆GPS婡婍傗揹攇帪寁僉僢僩偱帪崗忣曬傪摼傞偙偲傪峫偊傞丅
偙偙偱偼忢帪僀儞僞乕僱僢僩偲偺愙懕傪慖戰偟丄億働僢僩WiFi偺傛偆側僀儞僞乕僱僢僩偺愙懕娐嫬偑採嫙偱偒傞抂枛偲
偙偺抂枛偲偺傾僋僙僗偑偱偒傞婡婍偲偟偰柍慄LAN偲LAN僐僱僋僞傪傕偮RaspberryPi3(or 3+)偵拠夘偝偣傞丅
偙傟偵愭棫偪丄RaspberryPi4偵偼4偮偺USB僜働僢僩偑偁傞偺偱僆儕僕僫儖偺wlan0偲偼暿偵USB宆柍慄LAN 傾僟僾僞傪庢晅偗wlan1偲偟丄
wlan1傪捠偟偰億働僢僩WiFi偵愙懕偱偒傟偽椙偝偦偆偵巚偊傞偑偆傑偔偄偐側偄丅
偳偆傗傜柍慄LAN僪儔僀僶偼1偮偺柍慄LAN偟偐懳墳偱偒側偄傛偆偩丅
僽儘僢僋恾偵偁傞RaspberryPi偼幆暿偺偨傔偺偦傟偧傟堎側偭偨儂僗僩柤偵偟偰偍偔丅
傑偨丄Raspberry3乮or 3+乯偑偁傟偽丄RaspberryPi0偺旕椡傪曗偆婲摦SD嶌惉梡搑偲偟偰巊梡偱偒傞丅
僽儘僢僋恾偺RaspberryPi0偼徚旓揹椡偺儊儕僢僩偑偁傞偑僔儞僌儖僐傾側偺偱旕椡偱偁傞丅
偦偺RaspberryPi0偺婲摦SD僇乕僪(僔僗僥儉SD僇乕僪)傪Raspberry3乮or 3+乯偱嶌惉偡傞偙偲偑偱偒傞丅
OS偺buster偼慡儌僨儖巊梡壜擻偱Raspi0偲Raspi3偲偼屳姺偑岠偔丅
巊梡曽朄偲偟偰丄僀儞僞乕僱僢僩懁偵eth0偵偟偰婲摦SD僇乕僪傪嶌惉偡傞丅
嶌惉屻eth0傪巊梡掆巭偟偰wlan0懁傪桳岠偵偟偰婲摦梡SD僇乕僪偲偟偰RaspberryPi0偵嵎懼偊傞丅
偝偰丄姰惉屻偺巊梡専徹偩偑丄Pi4偺僸乕僩僔儞僋偑偐側傝擬偔側傞偺偱USB僼傽儞傪庢晅偗偨丅
埲崀丄惂嶌庤弴傪弴師採帵偟偰偄偔丅

埲崀丄惂嶌庤弴
Pi4愝掕梫椞
Pi3愝掕梫椞
Pi0愝掕梫椞
埲壓偼夁嫀偺婰帠
bullseye2022_04_04斉偱偼VNC巊梡帪偵VGA曄姺婍偑側偔偰傕巊梡偱偒傞傛偆偵夵慞偝傟偰偄傞丅
俀丏俼倎倱倫倐倕倰倰倷俹倝妶梡丂俀侽俀侾擭摉帪
悘帪丄壛昅掶惓偟偰偄傑偡丅
RaspberryPi4偑儕儕乕僗偝傟丄僙儈僫乕偵揔偟偨働乕僗傕懙偭偰偒偨丅
俉寧偺撪梕傪Pi係偵夵曇偟丄妶梡惈偺掅偄傕偺偼嶍彍偟偨丅乮偨偩偟丄偙傟傑偱偺撪梕偼俀乫偵偟偰旛朰榐乯
傑偨夵曇偵敽偄丄俈僙僌儊儞僩傪僇僜乕僪僐儌儞偵曄偊偨丅偙傟傑偱偩傑偟偩傑偟巊偭偰偄偨偑丄摦嶌僄儔乕偑尠挊偵側偭偨偨傔丅
偲偙傠偱Pi係偼崅惈擻偵側偭偨偑丄徚旓揹椡偑戝偒偄偺偱慻崬傒偵偼揔偝側偄偐傕偟傟側偄丄
Pi4偼OS搵嵹偱揹椡偑妋曐偱偒傞娐嫬偱偺僐儞僩儘乕儔偲偟偰偺梡搑偑揔偟偰偄傞偩傠偆丅
傑偨丄杮撪梕偱Pi3偺専徹傕壜擻偩丅偦偺嵺偺拲堄揰傕晅婰偟偰偍偔丅乮偨偩偟丄OS乮SD僇乕僪乯偺屳姺惈偼側偄偺偱拲堄偺偙偲乯
傑偨丄嘔偺僠僃僢僋僾儘僌儔儉blink.c偺弌椡愝掕娭悢偵晄嬶崌偑偁偭偨偺偱廋惓傪壛偊偰偁傞丅
奣梫
嘆丗VMware Player傪巊梡偡傞丅ubuntuPC傪弨旛偡傞丅[晅榐]傾僫儘僌儌僯僞傪巊梡偡傞丅
VNC夋憸偺夝憸搙愝掕
嘇丗wiringPi儔僀僽儔儕偱SPI捠怣傪偡傞丅I2C捠怣傪偡傞丅MCP23S17,MCP23017傪巊偭偨SPI丄I2C偵傛傞怣崋奼挘
嘊丗USBWeb僇儊儔傪巊梡偡傞丅IP傾僪儗僗偺巜掕愝掕偡傞丅FFmpeg傪巊梡偡傞丅
嘋丗Web僒乕僶婡擻傪巊梡偡傞丅PHP丅CGI惂屼偡傞丅Web僇儊儔偱mjpg-streamer偲CGI傪楢実偡傞丅
嘍丗RaspberryPi偺僇儊儔儌僕儏乕儖傪巊梡偡傞丅娔帇僇儊儔僒儞僾儖丅
嘐丗僋儘僗僐儞僷僀儔偱ubuntuPC偱僐儞僷僀儖偡傞丅kernel偺嵞峔抸乮kernel,kernel7,kernel7l,kernel8)傪偡傞丅
嘑丗乮嶍彍乯
嘒丗乮嶍彍乯
嘓丗samba傪僀儞僗僩乕儖偟偰僼傽僀儖僒乕僶偵偡傞丅
嘔丗/dev/mem僪儔僀僶傪巊偭偰GPIO傪惂屼偡傞丅
嘕丗16x2峴偺LCD丄LED揰摂偺弌椡宍幃偺僨僶僀僗僪儔僀僶傪嶌惉偡傞丅MakeFile偺偟偔傒傪岺晇嶌惉偡傞丅
LCD偼僐乕僪偑挿偄偺偱帪娫抁弅梡偵2屄偺LED偺弌椡宍幃偺僨僶僀僗僪儔僀僶捛壛
嘖丗儊僇僯僇儖僗僀僢僠傪巊偭偰擖椡宍偺僨僶僀僗僪儔僀僶傪嶌惉偡傞丅LCD偲楢実偝偣偰惂屼偡傞丅
嘗丗埵抲惂屼宆偺僒乕儃儌乕僞傪僐儞僩儘乕儖丅
嘙丗PWM弌椡丅/dev/mem僪儔僀僶傪巊偭偰丅僒乕儃儌乕僞惂屼丅
丂丂丂擟堄攇宍惗惉乮FIFO巊梡乯丂sin攇丅
丂丂丂儐乕僓儔儞僪偵偰DMA巊梡偵傛傞孞曉偟擟堄攇宍惗惉丂sin攇
乮暘妱偝傟偰偄傞偺偼儗儞僞儖僒乕僶乕偺僼傽僀儖僒僀僘惂尷偺偨傔乯
丂嘆-1丂
丂嘆-2丂
丂嘆-3丂
丂嘇-1丂
丂嘇-2丂
丂嘊-1丂
丂嘊-2丂
丂丂嘋丂丂
丂嘍丂丂
丂嘐-1丂
丂嘐-2丂
丂 嘓 丂
丂 嘔 丂
嘕-1丂
嘕-2丂
嘕-3丂
嘖-1
嘖-2
丂 嘗丂
嘙-1丂
嘙-2丂
嘙-3丂
嘙-4丂
俀乫丏俼倎倱倫倐倕倰倰倷俹倝妶梡丂乮旛朰榐乯
Raspbian偺婰帠
偐偮偰偺帒椏偲偟偰曐懚
俀侽俀侽乛俉寧摉帪
奣梫
嘆丗VMware Player傪巊梡偡傞丅ubuntuPC傪弨旛偡傞丅[晅榐]傾僫儘僌儌僯僞傪巊梡偡傞丅
VNC夋憸偺夝憸搙愝掕
嘇丗wiringPi儔僀僽儔儕偱SPI捠怣傪偡傞丅I2C捠怣傪偡傞丅MCP23S17,MCP23017傪巊偭偨SPI丄I2C偵傛傞怣崋奼挘
嘊丗USBWeb僇儊儔傪巊梡偡傞丅IP傾僪儗僗偺巜掕愝掕偡傞丅FFmpeg傪巊梡偡傞丅
嘋丗Web僒乕僶婡擻傪巊梡偡傞丅PHP丅CGI惂屼偡傞丅Web僇儊儔偱mjpg-streamer偲CGI傪楢実偡傞丅
嘍丗RaspberryPi偺僇儊儔儌僕儏乕儖傪巊梡偡傞丅娔帇僇儊儔僒儞僾儖丅
嘐丗僋儘僗僐儞僷僀儔偱ubuntuPC偱僐儞僷僀儖偡傞丅kernel偺嵞峔抸傪偡傞丅乮RasPi惈擻偺傾僢僾偲偲傕偵廳梫搙掅壓乯
嘑丗庤崰側usb愙懕乮僪儔僀僶偼僔儕傾儖捠怣乯僾儕儞僞傪惂屼偡傞丅乮寢峔偔偣偺偁傞僾儕儞僞側偺偱嶲峫傑偱乯
嘒丗skype傪巊梡偡傞丅x86僄儈儏儗乕僞乮EltechExaGear)傪巊梡偡傞丅乮儊儞僥側偟丅擭悢傕宱夁偟偰偄傞偺偱嶲峫傑偱乯
嘓丗samba傪僀儞僗僩乕儖偟偰僼傽僀儖僒乕僶偵偡傞丅
嘔丗/dev/mem僪儔僀僶傪巊偭偰GPIO傪惂屼偡傞丅
嘕丗16x2峴偺LCD偱弌椡宍偺僨僶僀僗僪儔僀僶傪嶌惉偡傞丅MakeFile偺偟偔傒傪岺晇嶌惉偡傞丅
嘖丗儊僇僯僇儖僗僀僢僠傪巊偭偰擖椡宍偺僨僶僀僗僪儔僀僶傪嶌惉偡傞丅LCD偲楢実偝偣偰惂屼偡傞丅
嘗丗埵抲惂屼宆偺僒乕儃儌乕僞傪僐儞僩儘乕儖丅僪儔僀僶傪嶌惉偡傞丅僙儖僼僐儞僷僀儔傪巊偭偰嶌惉傕偡傞丅
嘙-1丗PWM弌椡丅/dev/mem僪儔僀僶傪巊偭偰丅僒乕儃儌乕僞惂屼丅
丂丂丂擟堄攇宍惗惉乮FIFO巊梡乯丂sin攇丅
丂丂丂儐乕僓儔儞僪偵偰DMA巊梡偵傛傞孞曉偟擟堄攇宍惗惉丂sin攇
丂嘆-1丂
丂嘆-2丂
丂嘆-3丂
丂嘆-4丂
丂嘇-1丂
丂嘇-2丂
丂 嘊 丂
丂丂嘋丂丂
丂丂嘍丂丂
丂嘐-1丂
丂嘐-2丂
丂嘓 丂
丂嘔 丂
丂嘕 丂
丂嘖 丂
丂嘗-1丂
丂嘗-2丂
丂嘗-3丂
丂嘙-1丂
丂嘙-2丂
俁丏俴倝値倳倶偵傛傞慻崬傒僔僗僥儉奐敪丂俥倕倓倧倰倎曇
奣梫乮廔椆偟偰偄傑偡丅)
巊梡晹昳_27擭搙斉
嘆亅侾乮帋梡斉乯
嘆亅俀乮帋梡斉乯
丂
嘇乮帋梡斉乯
丂
嘊乮帋梡斉乯
嘋亅侾乮帋梡斉乯
嘋亅俀乮帋梡斉乯
嘍乮帋梡斉乯
丂
嘐乮帋梡斉乯丂
嘑亅侾乮帋梡斉乯
嘑亅俀乮帋梡斉乯
嘒亅侾乮帋梡斉乯
嘒亅俀乮帋梡斉乯
係丏俴倝値倳倶偵傛傞慻崬傒僔僗僥儉奐敪丂俛倳倱倷俛倧倶曇
奣梫乮廔椆偟偰偄傑偡丅)
巊梡晹昳_26擭搙斉
嘆亅侾
丂
嘆亅俀
丂
嘇亅侾
丂
嘇亅俀
丂
嘊亅侾
丂
嘊亅俀丂
嘋
丂
嘍
俆丏傾儖僥儔俥俹俧俙丂奐敪妛廗儃乕僪丂俢俤侽乮尰嵼偼擖庤晄壜丅屻宲儃乕僪偵懳偟偰偺僜乕僗僐乕僪偺嶲峫帒椏)
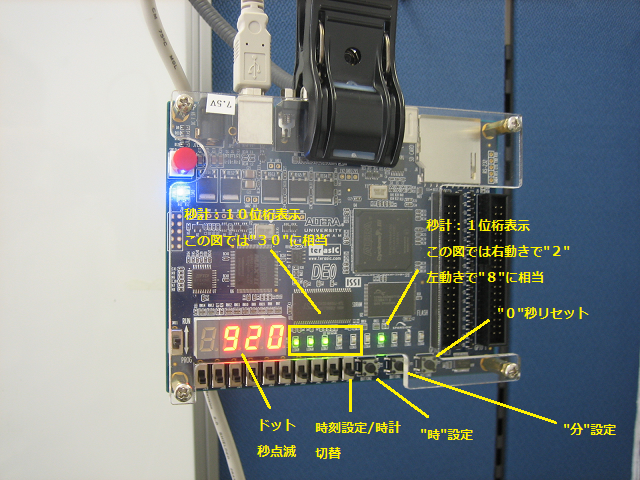
俢俤侽偺帪寁僒儞僾儖丅
Tokei.zip
俼俷俵偺忋彂偒偱僨儌僾儘僌儔儉偑側偔側偭偰偟傑偭偨応崌側偳丄僀儞僥儕傾偲偟偰丅
幨恀偑帵偡帪娫偼俋帪俀侽暘俁俀昩偁傞偄偼俁俉昩丄俁俀偲俁俉偼俴俤俢偺摦偒偱幆暿偡傞丅
拲丗側偍俢俤侽偺俬俹僐傾俠倷們倢倧値嘨偼奐敪僣乕儖俻倳倎倰倲倳倱嘦偺僶乕僕儑儞侾俁傑偱偺僒億乕僩昳乮侾係埲崀偼僒億乕僩側偟乯側偺偱僣乕儖慖戰帪偵偼拲堄偺偙偲丅
俇丏帒奿帋尡側偳懳嶔傾僾儕乮僨乕僞儀乕僗偱偳傫側帒奿帋尡偵傕懳墳壜擻乯
懳嶔偔傫丏倸倝倫
懳嶔偔傫偺奣梫愢柧乮倫倓倖乯
乽懳嶔偔傫乿偼奺帺偑儅僀僋儘僜僼僩僄僋僙儖乮埲壓僄僋僙儖乯偱栤戣暥偲夝摎暥傪擖椡偟偰僨乕僞儀乕僗傪嶌傝丄
孞傝曉偟僩儗乕僯儞僌偡傞僣乕儖偱偡丅
僂僀儞僪僂僘俈仌僄僋僙儖俀侽侾侽偱偺摦嶌偑妋擣偝傟偰偄傑偡丅乮倃俹偱偺摦嶌晄壜乯
挊嶌尃偺栤戣傕偁傞偺偱栤戣偲夝摎偺僨乕僞儀乕僗偼奺帺偱嶌惉偟偰偔偩偝偄丅
僒儞僾儖僼傽僀儖偲偟偰悢栤偩偗偺僄僋僙儖僼傽僀儖傪宖嵹偟偰偄傑偡丅
嵟弶偵乮傾儞僀儞僗僩乕儖曽朄乯
儗僕僗僩儕傊偺彂崬傒偼偁傝傑偣傫丅
晄梫偵側傟偽乽懳嶔偔傫僼僅儖僟乿傪僼僅儖僟偛偲嶍彍偡傟偽傾儞僀儞僗僩乕儖偼廔椆偟傑偡丅僑儈傪巆偟傑偣傫丅
乮僀儞僗僩乕儖仌巊梡曽朄乯
僟僂儞儘乕僪偟偨埑弅僼傽僀儖傪夝搥屻丄乽懳嶔偔傫僼僅儖僟乿傪僼僅儖僟枅乮埑弅僼傽僀儖偼昁偢夝搥張棟偺偙偲乯揔摉側応強偵僐僺乕偟傑偡丅
僼僅儖僟撪偺乽懳嶔偔傫.exe乿傪幚峴偟傑偡丅
側偍丄幚峴僼傽僀儖偺僔儑乕僩僇僢僩傪僨傿僗僋僩僢僾偵揬傝偮偗傞偲傛傝曋棙偵巊偊傑偡丅
摉慠偱偡偑丄儅僀僋儘僜僼僩丒僄僋僙儖偑僀儞僗僩乕儖偝傟偰偄傞偙偲偑慜採偱偡丅
乮僨乕僞儀乕僗偯偔傝丒栤戣嶌惉乯
乽database僼僅儖僟乿撪偵偰 _僨乕僞嶌惉庤弴.xlsx傪嶲峫偵嶌惉偟傑偡丅
嬶懱揑偵偼 _悧宍.xlsx傪忋彂偒偟偰揔摉側僼傽僀儖柤偵偟偰曐懚偡傟偽嶌惉偱偒傑偡丅
乮僨乕僞儀乕僗偯偔傝丒恾柺嶌惉乯
係俆侽倶俁侽侽僪僢僩偱夋憸傪嶌惉偟乽database僼僅儖僟乿仺乽夋憸僼僅儖僟乿偵曐懚偟傑偡丅
乽夋憸僼僅儖僟乿偵偼 _昤夋嶌惉庤弴.xlsx偑偁傞偺偱偙傟偵廬偭偰嶌惉偟傑偡丅
嬶懱揑偵偼
侾丏_昤夋嶌惉庤弴.xlsx偺愒榞僗儁乕僗撪偵僄僋僙儖偺昤夋僣乕儖偱奊傪昤偒丄
儁僀儞僩傾僾儕傪婲摦偟偰昤夋晹暘傪揬傝偮偗傑偡丅
戝偒偝傪係俆侽倶俁侽侽僪僢僩偵挷惍偟揔摉側柤慜偺僼傽僀儖柤偵偟偰曐懚偟傑偡丅
俀丏柍戣.bmp傪儁僀儞僩傾僾儕偱奐偒丄昤夋僣乕儖偱恾柺傪嶌惉偟偨偁偲揔摉側柤慜偺僼傽僀儖柤偵偟偰曐懚偟傑偡丅
侾.傑偨偼俀.偺張棟偺屻丄僨乕僞儀乕僗偱偁傞僄僋僙儖僼傽僀儖偺巜掕僙儖偵恾柺僼傽僀儖柤傪婰弎偟傑偡丅
乮偦偺懠乯
僄僋僙儖僜僼僩偺廔椆偑埆偐偭偨傝偡傞偲僄僋僙儖僜僼僩偺僝儞價乮夋柺偱妋擣偱偒側偄偑僞僗僋儅僱乕僕儍乕偱妋擣壜擻乯偑敪惗偟傑偡丅
摿偵僨乕僞儀乕僗曇廤帪偵敪惗偟傗偡偄孹岦偑偁傝傑偡丅
埨慡偺偨傔僨乕僞儀乕僗曇廤拞偼懠偺僄僋僙儖僜僼僩偑婲摦偟偰偄傟偽廔椆偟偰偔偩偝偄丅
僝儞價帺懱偼僐儞僺儏乕僞偺嵞婲摦偱側偔側傝傑偡丅